Двуногого робота Cassie научили чеканить мячик, одновременно с этим поддерживая баланс. В будущем подобный навык может помочь при решении прикладных задач, требующих выполнения сразу нескольких динамических действий, а также для обучения робота пониманию контактной и пост-контактной физики объектов, рассказали инженеры в интервью IEEE Spectrum.
Отметим, что, хотя ходячие роботы имеют преимущества перед колесными, их конструкция и алгоритмы управления устроены гораздо сложнее. Это обусловлено тем, что такие роботы нестабильны и им постоянно приходится поддерживать баланс, отслеживая свое положение и тщательно рассчитывая будущие движения. При этом если разработчики создают робота с руками, способного выполнять с их помощью какие-либо задачи, управление становится еще более сложным, поскольку асинхронные движения рук и ног приходится согласовывать, чтобы робот не упал.
Инженеры из Калифорнийского университета в Беркли в 2017 году представили двуногого робота Cassie, а затем создали на его базе человекоподобного робота Digit, отличающегося от Cassie наличием туловища и рук. На протяжении двух лет разработчики постоянно обучают роботов различным частным нетривиальным навыкам, предполагая, что в будущем эти наработки можно будет использовать для создания универсального робота, которого можно применять на практике.
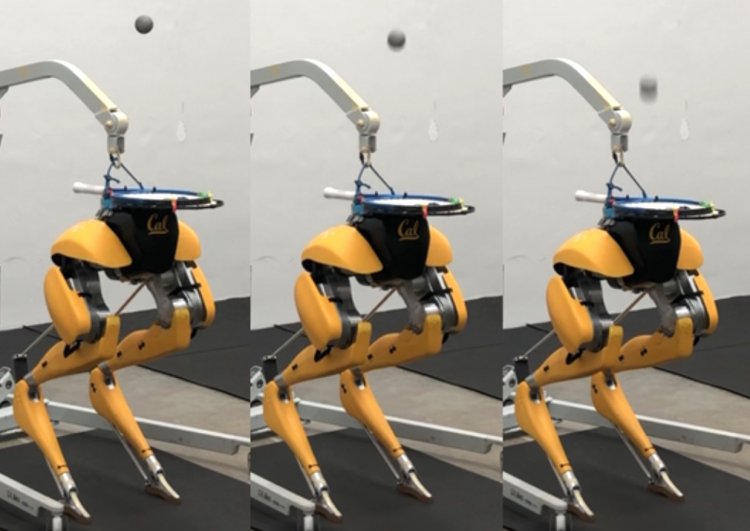
Последний на данный момент навык, которому американские инженеры научили Cassie, заключается в подбрасывании мячика над собой с помощью небольшой площадки в верхней части корпуса-«туловища». После того, как инженер отпускает мячик над роботом, он начинает двигать корпусом вверх-вниз, а также немного наклонять его в сторону в зависимости от траектории мяча. Одновременно с этим робот поддерживает стабильное положение на одном месте.
Пока робот имеет несколько ограничений во время чеканки мяча. Во-первых, он отслеживает положение площадки и мячика с помощью внешней системы захвата движений (разработчики уточняют, что в принципе они могли бы обойтись и без нее, задействовав установленную под определенном углом камеру, однако не захотели утруждать себя решением дополнительных сложностей на данном этапе). Во-вторых, алгоритм управления исходит из того, что робот стоит абсолютно неподвижно, а на самом деле он может слегка смещаться, из-за чего постепенно появляется ошибка в расчетах, и робот со временем теряет мяч.

В дальнейшем инженеры намерены научить робота чеканить мяч не только без внешней системы захвата движений, но и во время ходьбы, а также одновременно управляться с несколькими мячами и ловить мячик, бросаемый человеком. Предполагается, что в будущем эти навыки пригодятся при создании робота, способного, в числе прочего, оценивать поведение предметов после физического контакта — например, такой робот будет готов к тому, что предмет, который ему необходимо поймать, может отскочить от рук или от пола, а кроме того, чтобы расчистить место на столе, устройство сможет подвинуть одним движением руки сразу несколько предметов вместо того, чтобы вручную переставлять каждый из них.

0 комментариев
Добавить комментарий