Американские инженеры создали систему для удаленного управления экспериментальным двуногим роботом. Ее отличие от большинства подобных систем заключается в том, что оператор не только управляет движением устройства, но и получает обратную связь — например, когда робота толкают. Кроме того, разработчики использовали в системе пропорциональную передачу движений, учитывающую разницу в размерах, массе и конструкции между человеком и роботом. Статья с описанием новации опубликована в журнале Science Robotics.
Отметим, что в последние годы в области ходячих роботов произошел резкий скачок развития. Некоторые разработки, к примеру, робот Atlas от Boston Dynamics, уже обладают впечатляющими возможностями. Однако даже их недостаточно для полноценного применения.
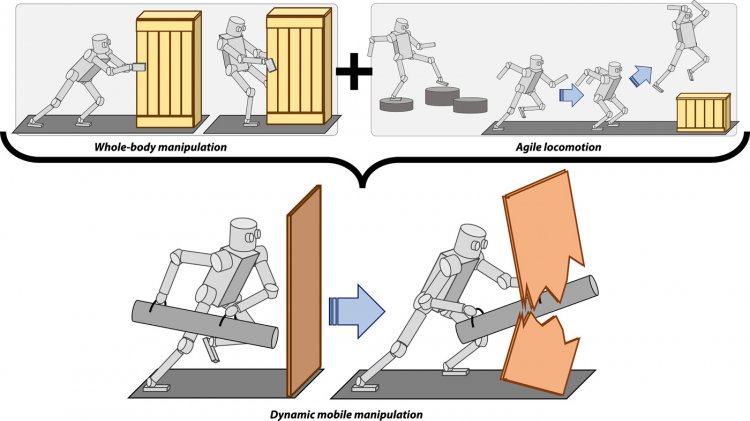
Например, одна из самых перспективных областей применения двуногих роботов — устранение последствий природных и техногенных катастроф. Чтобы робот мог полноценно заменить спасателей в таких условиях, он должен уметь не только уверенно шагать по развалинам, сохраняя равновесие, но и открывать двери, поворачивать краны, двигать большие конструкции и выполнять другие простые для людей, но сложные для машин действия, требующие точной и согласованной работы всего двигательного аппарата. Проблема в том, что сделать роботов универсальными пока что не удается, а кроме того, трудноразрешимые сложности возникают при разработке ПО, которое бы позволяло роботизированным двуногим устройствам, конструктивно более приспособленным для передвижения по спроектированному для людей окружению, эффективно сохранять равновесие при возможной отдаче: сейчас, если такой дроид захочет, к примеру, выбить ногой дверь или отбросить тяжелый предмет, он, вероятнее всего, нелепо завалится на пол.
Вместе с тем, у создания универсальных роботов есть альтернатива в виде телеуправления. Данный способ управления позволяет устройствам выполнять действия, полагаясь не на датчики и алгоритмы управления, а на человека-оператора. Однако у многих существующих телеуправляемых роботов есть недостатки. Главный из них заключается в отсутствии у многих таких разработок обратной связи, но даже если она есть, синхронизация движений между оператором и роботом обычно не учитывает разницу в пропорциях, скорости движения и других важных параметрах, из-за чего телеуправляемые роботы также подвержены падениям.
Американские исследователи из Иллинойсского университета в Урбане-Шампейне и Массачусетского технологического института решили разработать систему, которая позволила бы оператору в точности ощущать движения робота и благодаря этому эффективно его контролировать, и в результате представили экспериментального телеуправляемого робота Little HERMES ростом в треть человеческого тела и специальный стенд для телеуправления.
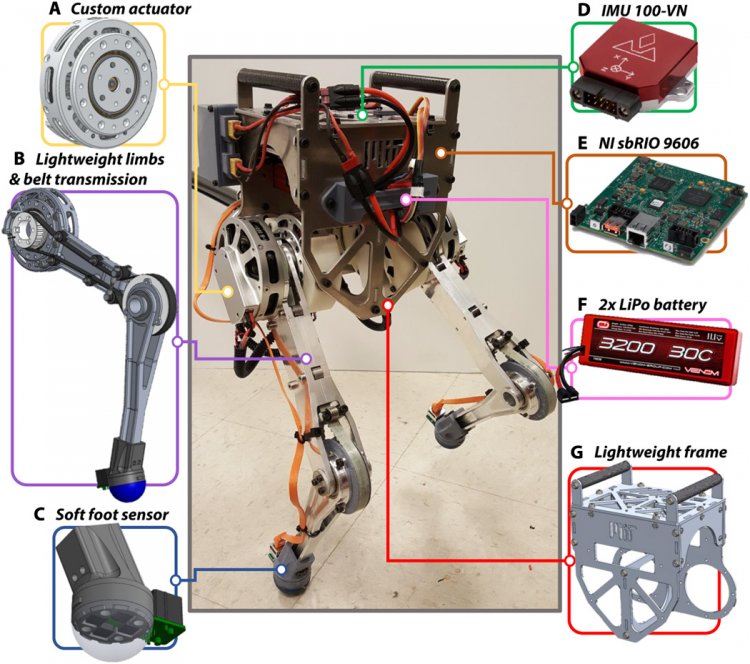
Как сообщается, Little HERMES представляет собой двуногую конструкцию с двухсекционными ногами. Между собой, а также с общим центром ноги связаны мощными актуаторами. Кроме того, в основании каждой ноги установлено по четыре пьезоэлектрических датчика давления. Поскольку инженеры решали в рамках этой работы частную задачу, а не создавали полноценного универсального робота, Little HERMES крепится на штанге, удерживающей его и не дающей падать вперед или назад.
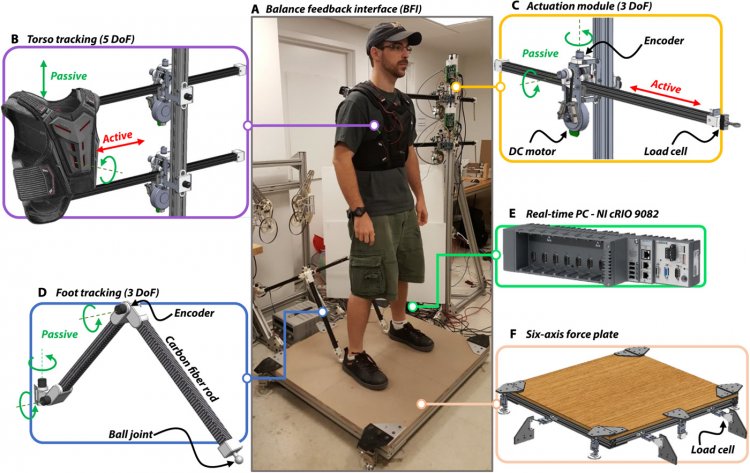
Новоявленный аппарат управляется командами от стенда, на котором располагается оператор. Он механически связан со стендом с помощью четырех оснащенных сенсорами движения подвижных штанг, две из которых являются двухсекционными и расположены снизу (по одной на каждую ногу), а остальные две находятся сверху, крепятся к надеваемому на оператора жилету и могут двигаться вправо и влево благодаря актуаторам, через которые они закреплены к вертикальной балке стенда. Вдобавок к этому поверхность, на которой стоит оператор, установлена на датчики давления, что позволяет рассчитывать силу, с которой ноги человека давят на пол.
Движения между оператором и роботом синхронизируются не напрямую. Вместо этого разработчики создали две модели, описывающие оператора и робота. Инженеры упростили задачу до обратного маятника, состоящего из центра масс сверху и жесткого стержня. Такая схема передачи данных о движениях позволяет корректно передавать движения между оператором и роботом, учитывая разницу в размерах.
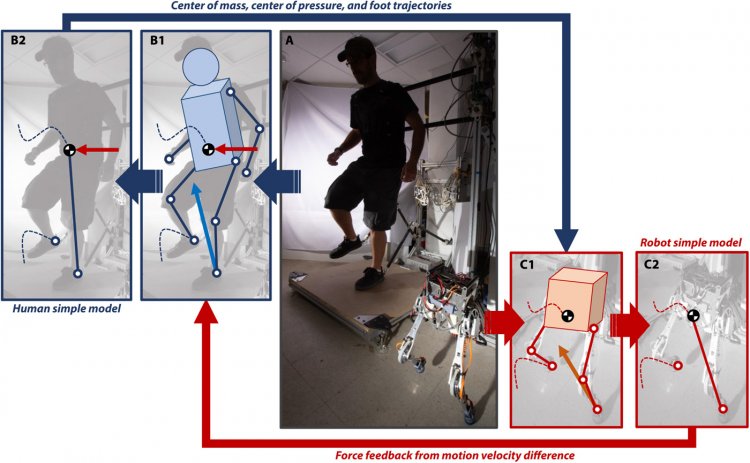
Авторы показали на видео примеры того, что робот способен повторять движения человека при шагании и подпрыгивании вверх. Кроме того, на ролике можно видеть, что если робота толкают, он моментально передает движение человеку, после чего тот рефлекторно компенсирует внешнее воздействие и тем самым спасает себя от падения; в это же время так же поступает робот и ему тоже удается сохранить равновесие. Аналогично, когда робот шагал по неровной поверхности, обратная связь от телеоператора позволяла ему эффективно сохранять баланс.
Наконец, инженеры продемонстрировали схему со стабилизацией не в поперечной, а в продольной плоскости, при которой робот двигается вперед, когда человек шагает на месте.
«Разработанная нами система потенциально позволяет телеоператору, управляя условным роботом-спасателем, не только выбить с его помощью дверь, но и, почувствовав воздействие отдачи на робота, помочь устройству устоять на ногах, — комментирует разработку профессор Жоао Рамош, один из руководителей проекта. Еще один потенциальный сценарий использования решения — подъем и бросание тяжелых грузов, что при неправильном балансировании корпуса может завалить аппарат».
Будучи уверенными в перспективности разработки, исследователи в ближайшем будущем намерены проверить возможности системы при управлении уже полноценным гуманоидом, а также продолжить работу над ее совершенствованием.

0 комментариев
Добавить комментарий